






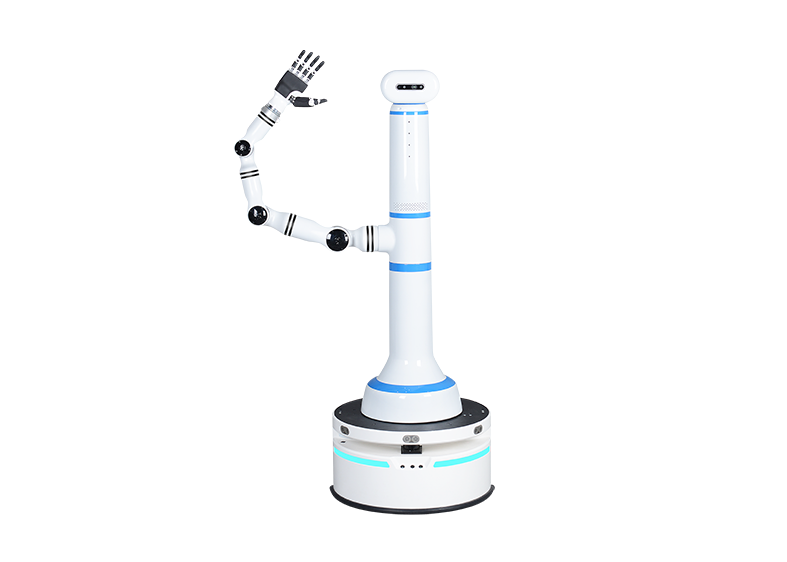





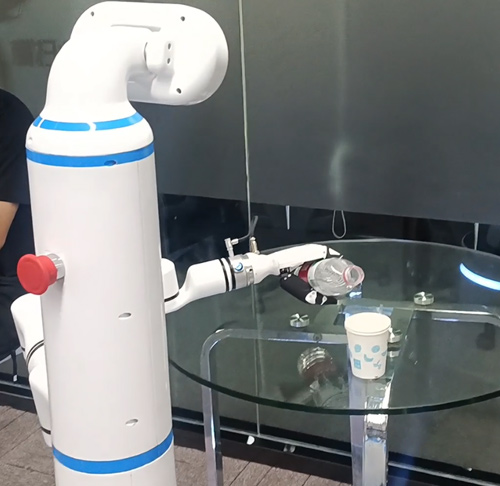
The single arm compound robot can realize robot mapping navigation, path planning, robotic arm kinematics, dynamics, trajectory planning, visual recognition, and other algorithms and applications, provide rich control cases and an open software framework, and support users to develop applications for scenarios.
Advantages
Integration
Provide an integrated design for all components, which is convenient for maintenance and space saving.


Interactivity
Provide a user-friendly human-computer interaction interface, enabling learners to quickly understand the system.

Configuration
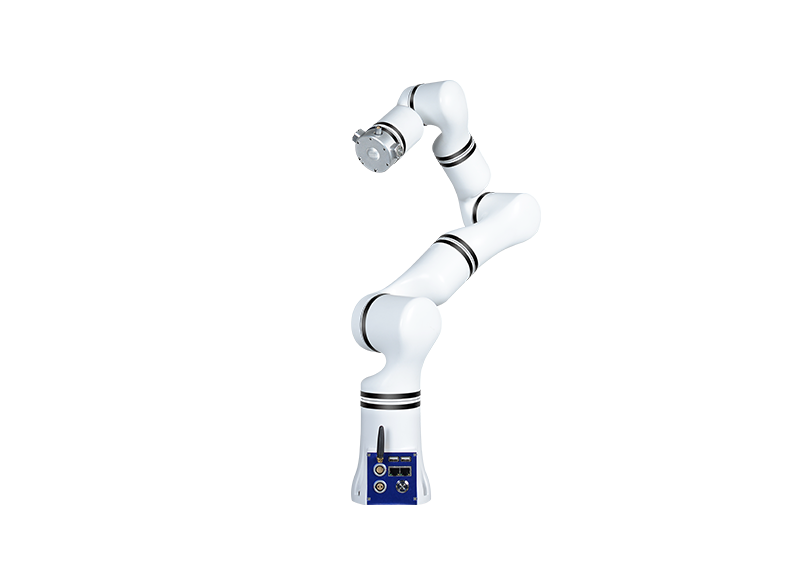
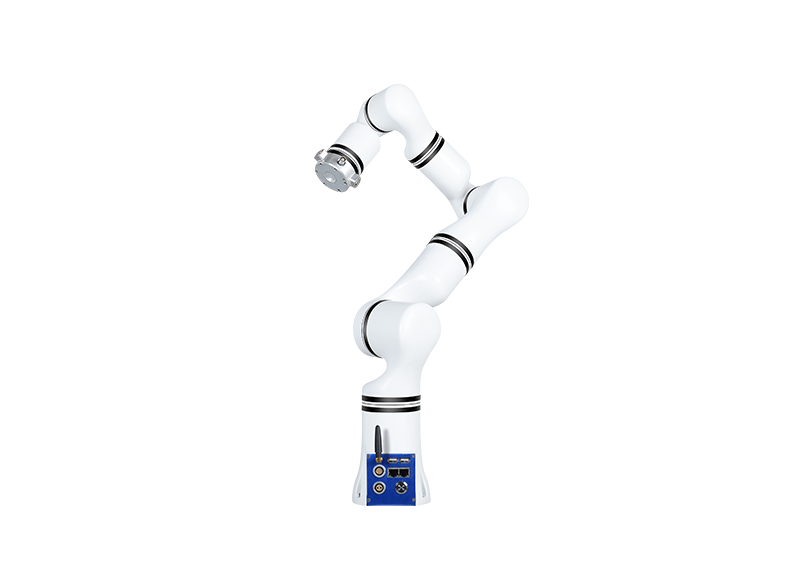
Integrate various humanoid functional devices such as mobile chassis, depth vision, voice module, robotic arm, and five-fingered dexterous hand.


Openness
Provide multiple forms of secondary development, and support users to develop applications for scenarios.
Rich Functionality
There are various types of sensors, and each unit can be individually controlled or cooperatively controlled.
Application Scenarios


Specs
Single Arm Compound Robot |
||
|---|---|---|
Model |
RMC-SA | |
Platform size |
Platform height 1360mm, maximum arm span 1040mm |
|
Weight |
About 72 kg |
|
Charging power supply |
Single-phase three-wire 220V ± 10% 50Hz |
|
Working voltage |
DC24V | |
Positioning accuracy |
<±5cm | |
Security protection |
Functions of laser scanning obstacle avoidance, visual obstacle avoidance, force sensors, emergency stop, etc. |
|
External interface |
Network interface, USB interface, HDMI |
|
Working environment |
Temperature -10°C to +40°C, relative humidity ≤ 85% (25°C), altitude <4000m |
|
Voice module |
MIC: Linear array 4 microphones Control system: Linux |
|
Effective lifting distance |
— | |
Moving speed |
1m/s | |
Lifting speed |
— | |
Main control module |
GPU | 384-core NVIDIA Volta™ GPU with 48 Tensor Cores |
| CPU | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6MB L2 + 4MB L3 |
|
Memory |
8GB 128-bit LPDDR4x 59.7GB/s |
|
Operating system |
Ubuntu18.04 | |
Number of network interfaces |
1 | |
Number of USB3.0 interfaces |
4 | |
Number of USB2.0 interfaces |
1 | |
Other interfaces |
GPIOs, I2C, I2S, SPI, UART | |
Size |
90mm×103mm×35mm | |
Downloads
Product Manual
-
RealManProduct brochuresV2.1_EN
PDF|5.17MB
Joint Information
-
Tiny Mighty joint module Brochure V1.0_EN
PDF|2.20MB
User Manual
-
RMC-HC-01 Healthcare Robot User Manual V1.0
pdf|1.78M
-
RealMan Robotrm_exampleUser Manual V1.0
pdf|392kb
-
RealMan Robotrm_controlUser Manual V1.0
pdf|236kb
-
RealMan Robotic Arm ROS2 User Manual V1.0
pdf|624kb
-
RealMan Robotic Arm rm_moveit2_config User Manual V1.0
pdf|844kb
-
RealMan Robotic Arm rm_gazebo User Manual V1.0
pdf|260kb
-
RealMan Robotic Arm rm_driver Topic Detailed Description (ROS2) V1.0
pdf|312kb
-
RealMan Robot rm_ros_interface User Manual V1.0
pdf|184kb
-
RealMan Robot rm_driver User Manual V1.0
pdf|324kb
-
RealMan Robot rm_description User Manual V1.0
pdf|344kb
Control Software
-
RML63 V6.1.4
ZIP|51.4MB
-
RM75 V6.1.4
ZIP|48.5MB
-
RM65 V6.1.4
ZIP|49MB
3D Model
-
ECO65-B
STP|5.23MB
-
ECO65-6F
STEP|11.1MB
-
RM65-B
STEP|9.61MB
-
RM65-ZF
STEP|10.0MB
-
RM65-6F
STEP|10.0MB
-
RM75-B
STEP|9.61MB
-
RM75-ZF
STEP|10.0MB
-
RM75-6F
STEP|10.0MB
-
RML63-B
STEP|5.58MB
-
RML63-ZF
STEP|6.00MB
Dimensional Drawing
-
ECO65 dimension
PDF|36.5KB
-
ECO65 installation drawing
PDF|22.6KB
-
End Effector Installation Dimensional Drawing
PDF|28.4KB
-
Installation Dimensional Drawing of RML63 Series Robot Arm Base
PDF|22.5KB
-
RML63 dimension
PDF|27.5KB
-
Installation Dimensional Drawing of RM65, RM75 Series Robot Arm Base
PDF|21.3KB
-
RM65 dimension
PDF|73.9KB
-
RM75 dimension
PDF|76.9KB
Development Protocol
-
RealMan 6-Dof Robot JSON Protocol-V3.1
PDF|1.01MB
SDK
-
RealMan Robot Interface Function Description V3.1
PDF|805KB
ROS
-
ROS1
zip|12.34MB
-
RM65系列URDF文件
zip|8.00kb
-
ROS2
zip|2.77MB