

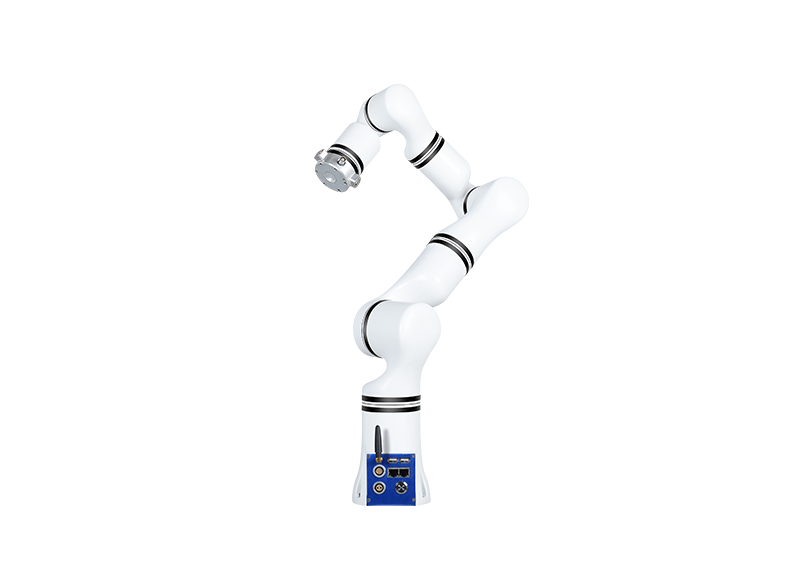







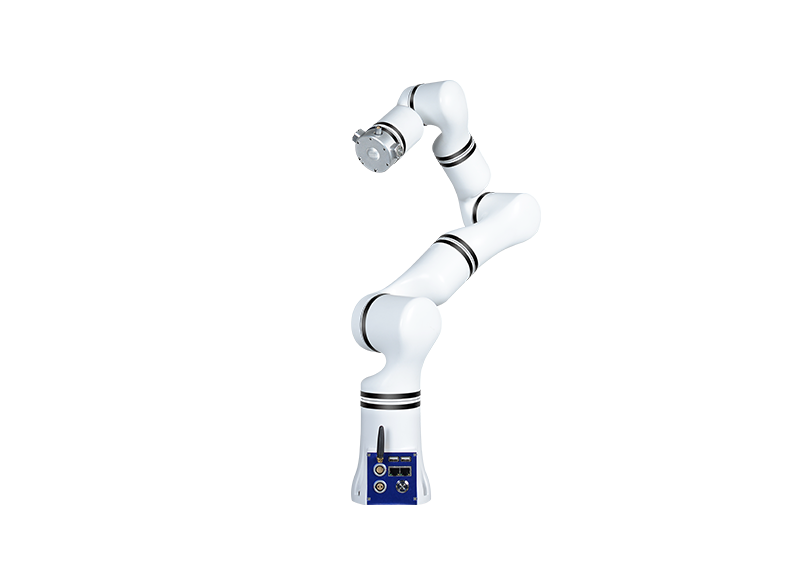
The RM65 series ultra-lightweight humanoid robotic arm is a 6-dof robotic arm developed and produced independently by RealMan. This series has three models: the RM65-B basic version, the RM65-ZF one-axis force version, and the RM65-6F six-axis force version. The robotic arm integrating the controller weighs 7.2 KG in total, with a payload of 5 KG and a working radius of 610- 638.5 mm. The ultra-small volume, coupled with a multi-platform interface system, makes it more suitable for a wide range of compound application scenarios. The robotic arm has a built-in safety module that stops upon touch, achieving human-machine safety cooperation, simplifying drag-and-drop teaching and making human-machine cooperation more user-friendly.
RM65-B
The RM65-B, a basic version of the 6-dof robotic arm, is self-developed and produced by Re......
Learn More+
RM65-6F
The RM65-6F, a 6-axis-force version of the 6-dof robotic arm, is self-developed and produc......
Learn More+Advantages


Ultra-high Load-to-self-weight Ratio
Ultra-lightweight body, with the self-weight of the robotic arm (including controller) being only 7.2 Kg, payload up to 5 Kg, 1:1.44 load-to-self-weight ratio, and an effective working radius of up to 610 mm.

Flexible Deployment
Ultra-small volume, with a maximum robotic arm diameter of 11.5 cm and a base installation diameter of 11 cm. The size of humanoid robotic arm greatly reduces the installation space requirements, making it more convenient and flexible.


Ultra-low Power
DC power supply of 24 V, suitable for mobile power supply, with a maximum power consumption of ≤ 200 W and a comprehensive power consumption of ≤ 100 W under full load, and can be applied in various scenarios.
Integrated Controller
No traditional control cabinet, perfectly integrating the controller with the robotic arm.
Ultra-high Compatibility
The end offers a general interface that is expandable and plug-and-play. The integrated robotic arm has rich interfaces to meet the expansion of application needs in a variety of industries.


Open System
Open API function library, supporting C/C++/C#/Python programming language, and supporting Windows/Linux/ROS robot operating systems and various communication protocols.
Safe and Sensitive
Sensitive drag and drop programming, which can fully reproduce the drag trajectory; The protection level can be set, and the robotic arm will stop immediately when the collision reaches the maximum torque limit, thereby avoiding injury to personnel or equ
Wireless and Convenient Connection
Connection and control of the robotic arm by wired and wireless means, easy and quick switching, and liberation from the limits of control cables.
Integrated Modularization
Integrated and modular design, easier disassembly and assembly, lower maintenance costs, and higher efficiency.


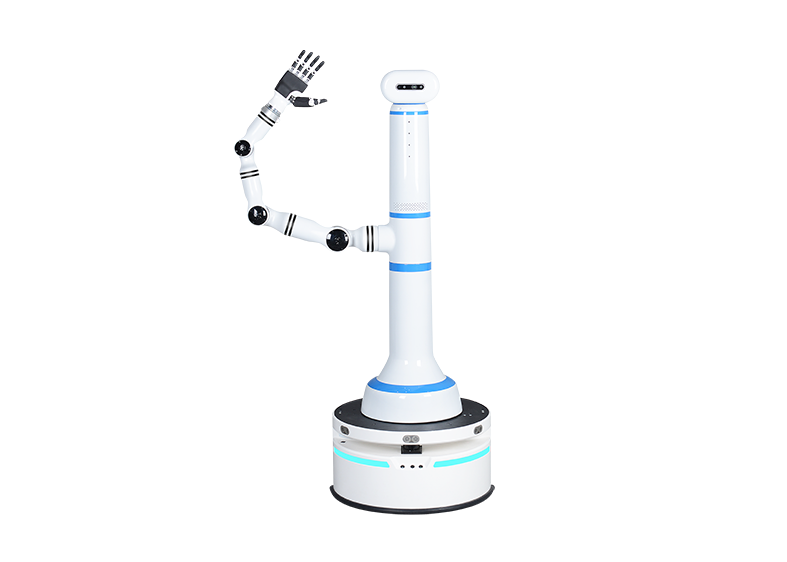
Application Scenarios








Downloads
Product Manual
RealManProduct brochuresV2.1_EN
PDF|5.17MB
Joint Information
Tiny Mighty joint module Brochure V1.0_EN
PDF|2.20MB
User Manual
RMC-HC-01 Healthcare Robot User Manual V1.0
pdf|1.78M
RealMan Robotrm_exampleUser Manual V1.0
pdf|392kb
RealMan Robotrm_controlUser Manual V1.0
pdf|236kb
RealMan Robotic Arm ROS2 User Manual V1.0
pdf|624kb
RealMan Robotic Arm rm_moveit2_config User Manual V1.0
pdf|844kb
RealMan Robotic Arm rm_gazebo User Manual V1.0
pdf|260kb
RealMan Robotic Arm rm_driver Topic Detailed Description (ROS2) V1.0
pdf|312kb
RealMan Robot rm_ros_interface User Manual V1.0
pdf|184kb
RealMan Robot rm_driver User Manual V1.0
pdf|324kb
RealMan Robot rm_description User Manual V1.0
pdf|344kb
Control Software
RML63 V6.1.4
ZIP|51.4MB
RM75 V6.1.4
ZIP|48.5MB
RM65 V6.1.4
ZIP|49MB
3D Model
ECO65-B
STP|5.23MB
ECO65-6F
STEP|11.1MB
RM65-B
STEP|9.61MB
RM65-ZF
STEP|10.0MB
RM65-6F
STEP|10.0MB
RM75-B
STEP|9.61MB
RM75-ZF
STEP|10.0MB
RM75-6F
STEP|10.0MB
RML63-B
STEP|5.58MB
RML63-ZF
STEP|6.00MB
Dimensional Drawing
ECO65 dimension
PDF|36.5KB
ECO65 installation drawing
PDF|22.6KB
End Effector Installation Dimensional Drawing
PDF|28.4KB
Installation Dimensional Drawing of RML63 Series Robot Arm Base
PDF|22.5KB
RML63 dimension
PDF|27.5KB
Installation Dimensional Drawing of RM65, RM75 Series Robot Arm Base
PDF|21.3KB
RM65 dimension
PDF|73.9KB
RM75 dimension
PDF|76.9KB
Development Protocol
RealMan 6-Dof Robot JSON Protocol-V3.1
PDF|1.01MB
SDK
RealMan Robot Interface Function Description V3.1
PDF|805KB
ROS
ROS1
zip|12.34MB
RM65系列URDF文件
zip|8.00kb
ROS2
zip|2.77MB