

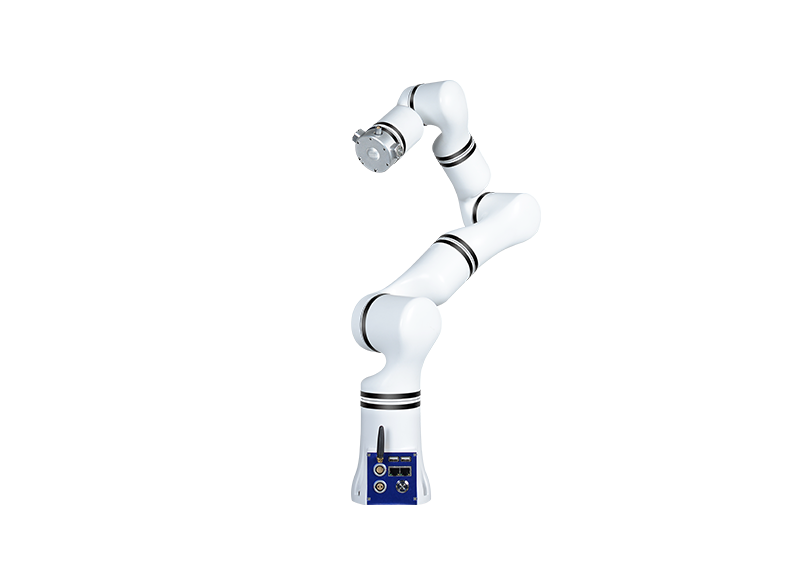

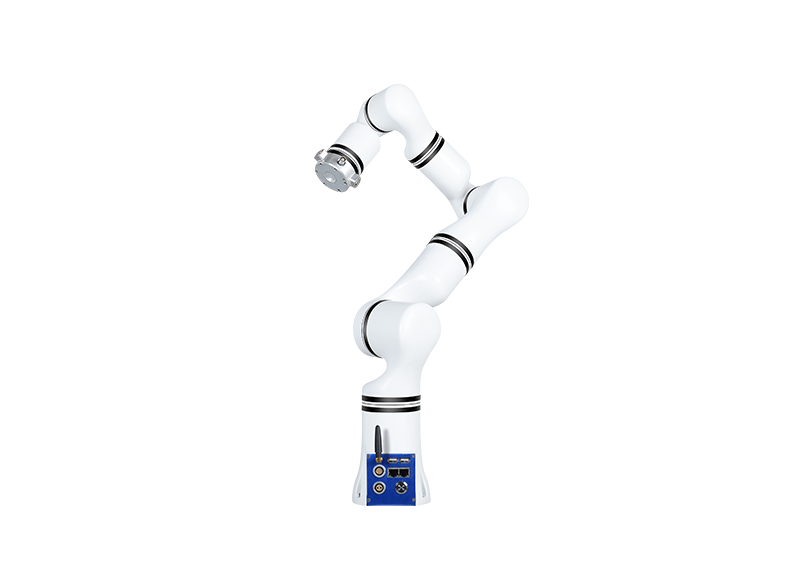








The RML63-6F, a 6-axis-force version of the 6-dof long arm span robotic arm, is self-developed and produced by RealMan. The controller is integrated at the bottom of the robotic arm, and is lightweight and flexible. The modular joint design of the robotic arm enables sufficient workspace, meeting the requirements of more complex application scenarios. Maximum power consumption ≤200W, comprehensive power consumption ≤100W.
-
10.1kg
Weight
-
3kg
Payload
-
928.5mm
Working radius
-
±0.05mm
Repeatability
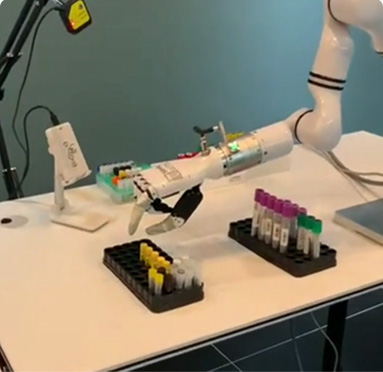

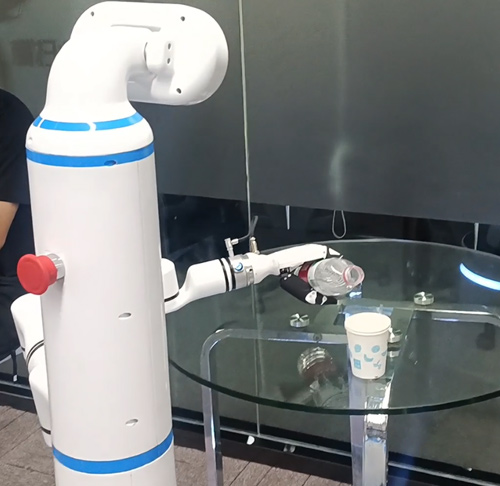
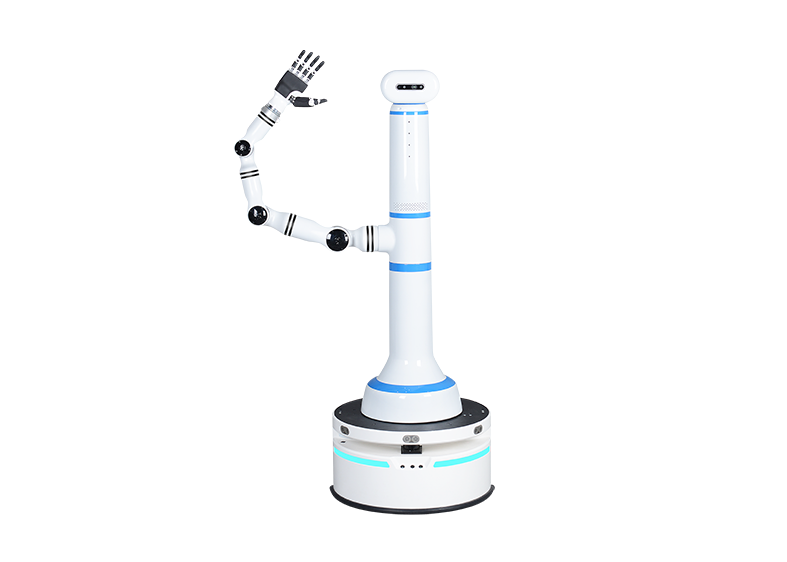
Application Scenarios






Specs
| RML63-6F | |
|---|---|
Degree of freedom |
6 |
Payload |
3kg |
Body weight |
10.1kg |
Repeatability |
±0.05mm |
Working radius |
928.5mm |
Six-axis force range |
200N/7Nm |
Six-axis force accuracy |
<0.1% FS |
Power supply voltage |
DC24V |
Power consumption |
Maximum power consumption ≤200W, comprehensive power consumption ≤100W |
Protection level |
IP54 (robotic arm body) |
Material |
Aluminum alloy |
Controller |
Integrated |
Communication mode |
WIFI/network port/Bluetooth/USB serial port/RS485 |
Control mode |
Drag and drop teaching/teaching pendant/API/JSON |
Joint motion range |
J1 ±178°、J2 ±178°、J3 +145°~-178°、J4 ±178°、J5 ±178°、J6 ±360° |
Joint maximum speed |
J1-J2 180°/s、J3-J6 225°/s |
Downloads
Product Manual
-
RealManProduct brochuresV2.1_EN
PDF|5.17MB
Joint Information
-
Tiny Mighty joint module Brochure V1.0_EN
PDF|2.20MB
User Manual
-
RMC-HC-01 Healthcare Robot User Manual V1.0
pdf|1.78M
-
RealMan Robotrm_exampleUser Manual V1.0
pdf|392kb
-
RealMan Robotrm_controlUser Manual V1.0
pdf|236kb
-
RealMan Robotic Arm ROS2 User Manual V1.0
pdf|624kb
-
RealMan Robotic Arm rm_moveit2_config User Manual V1.0
pdf|844kb
-
RealMan Robotic Arm rm_gazebo User Manual V1.0
pdf|260kb
-
RealMan Robotic Arm rm_driver Topic Detailed Description (ROS2) V1.0
pdf|312kb
-
RealMan Robot rm_ros_interface User Manual V1.0
pdf|184kb
-
RealMan Robot rm_driver User Manual V1.0
pdf|324kb
-
RealMan Robot rm_description User Manual V1.0
pdf|344kb
Control Software
-
RML63 V6.1.4
ZIP|51.4MB
-
RM75 V6.1.4
ZIP|48.5MB
-
RM65 V6.1.4
ZIP|49MB
3D Model
-
ECO65-B
STP|5.23MB
-
ECO65-6F
STEP|11.1MB
-
RM65-B
STEP|9.61MB
-
RM65-ZF
STEP|10.0MB
-
RM65-6F
STEP|10.0MB
-
RM75-B
STEP|9.61MB
-
RM75-ZF
STEP|10.0MB
-
RM75-6F
STEP|10.0MB
-
RML63-B
STEP|5.58MB
-
RML63-ZF
STEP|6.00MB
Dimensional Drawing
-
ECO65 dimension
PDF|36.5KB
-
ECO65 installation drawing
PDF|22.6KB
-
End Effector Installation Dimensional Drawing
PDF|28.4KB
-
Installation Dimensional Drawing of RML63 Series Robot Arm Base
PDF|22.5KB
-
RML63 dimension
PDF|27.5KB
-
Installation Dimensional Drawing of RM65, RM75 Series Robot Arm Base
PDF|21.3KB
-
RM65 dimension
PDF|73.9KB
-
RM75 dimension
PDF|76.9KB
Development Protocol
-
RealMan 6-Dof Robot JSON Protocol-V3.1
PDF|1.01MB
SDK
-
RealMan Robot Interface Function Description V3.1
PDF|805KB
ROS
-
ROS1
zip|12.34MB
-
RM65系列URDF文件
zip|8.00kb
-
ROS2
zip|2.77MB